Past Challenges
Meeting
| | Description
| | References
|
| | #56
April 24, 2010
| | ---------------------------------------------------------------------------
Stair Climbing
Repeat of last month’s mini-challenge.
| | n/a
|
| | #55
March 27, 2010
| | ---------------------------------------------------------------------------
Stair Climbing
Build a robot that can climb steps. The steps in the auditorium are irregular. Bonus points for going back down again.
| | n/a
|
| | #54
February 27, 2010
| | ---------------------------------------------------------------------------
OATS - Obstacle Avoiding Target Seeker
Build a robot that looks for a retroreflective target on the ground. Your robot will need to navigate around obstacles such as large boxes.
| | n/a
|
| | #53
January 30, 2010
| | ---------------------------------------------------------------------------
Rope Climbing
Build a robot that can climb a rope. Make this as challenging as you would like: find the rope, attach itself, go up and down, and detach again. Or just start climbing while already attached to the rope. The type of rope (or ribbon) is your choice, as is whether the rope is fastened only at the top, or both top and bottom.
| | n/a
|
| | #52
November 21, 2009
| | ---------------------------------------------------------------------------
Candy Dispenser
Build a robot that dispenses candy. You pick the candy, the eye-candy in the delivery mechanism, and the method of payment.
| | n/a
|
| | #51
September 26, 2009
| | ---------------------------------------------------------------------------
BrickCon Demo and Competition Robots
Bring a robot that you’d like to show at BrickCon. If it’s not yet done, you can ask others for suggestions. Or bring a walking robot that you’re working on for the robot competition at BrickCon.
| | n/a
|
| | #50
May 30, 2009
| | ---------------------------------------------------------------------------
Open Challenge
Bring a robot that you are proud of. Perhaps it does something difficult. Or something very interesting. Maybe it was just an experiment (even a failed one) that you learned a lot from.
| | n/a
|
| | #49
April 25, 2009
| | ---------------------------------------------------------------------------
Obstacle Sumo
Build a sumo robot that will push it’s opponent off a field with a heavy obstacle in the middle. The obstacle will be a 2 quart milk carton, either standing upright or lying on its side. The field will be 3’ diameter, white center, with a 2” black edge. Robots, to take part in the mini competition should have a 12”x12” maximum size, and weigh under 2 lb.
| | n/a
|
| | #48
February 21, 2009
| | ---------------------------------------------------------------------------
Play an Instrument
Build a robot to play a musical instrument. Your robot can play a toy instrument, or a real one. String, wind, percussion, electronic, whatever. You could even build an instrument out of LEGO if you wish. The only restriction is to use something besides the NXT or RCX speaker to make sound. Have fun!
| | n/a
|
| | #47
January 31, 2009
| | ---------------------------------------------------------------------------
BrickHeap Wars
Get together with a team to build and program a robot at the meeting. You’ll have three hours, then we’ll run the robots against each other. Finally you’ll have an additional half hour to improve the robots, and try again. Teams should attempt to form ahead of time, and need to bring a laptop to program, as well as the electronic components they wish to use. This includes an NXT (or RCX), sensors, motors, wires and batteries. The rest of the LEGO required for the task will be provided at the meeting.
| | n/a
|
| | #46
November 15, 2008
| | ---------------------------------------------------------------------------
Walking Race
Build a walking robot that can turn itself around. This idea comes from the Robothon Walking Robot Race.
| | n/a
|
| | #45
September 27, 2008
| | ---------------------------------------------------------------------------
TourBot
Repeat of last month’s mini-challenge.
| | n/a
|
| | #44
May 31, 2008
| | ---------------------------------------------------------------------------
TourBot
Build a robot that can do line tracking and turn 90-degree corners. We’ll put the robots in a ‘city’ where they will all be driving at the same time.
| | n/a
|
| | #43
April 26, 2008
| | ---------------------------------------------------------------------------
Innovative Way to Move
Build a robot that moves around using an unusual means of propulsion.
That is, have your robot use something besides just a plain vanilla driving or walking platform. It can do anything else it wants to. The robot should be able to move at least a couple of robot-lengths.
| | n/a
|
| | #42
February 23, 2008
| | ---------------------------------------------------------------------------
Robotic Easter Egg Hunt
Build a robot that will find Hershey’s chocolate Easter eggs and deliver them to the corners or sides of a rectangular arena with just over 2” high walls. These robots will be for display at Bellevue Square next month.
| | n/a
|
| | #41
January 26, 2008
| | ---------------------------------------------------------------------------
Table Crossing with Rope
There were many requests to repeat the mini-challenge from last month.
| | Pictures
|
| | #40
November 17, 2007
| | ---------------------------------------------------------------------------
Table Crossing with Rope
Build a robot that can cross between two tables with a taunt rope between them. The length of the rope is unknown ahead of time. But you should count on it being a couple of feet at least. You should start your robot completely on one table, and end up completely on the second table. If you want an extra challenge, have your robot find the rope first. (It will be pulled over top of both tables.)
Grand Challenge
This meeting also marked the start of a new Grand Challenge - a robotic INDY-500 style race.
| | Pictures
|
| | #39
September 22, 2007
| | ---------------------------------------------------------------------------
BrickHeap Wars
Teams from several clubs formed and built robots to fix a highway in very bad repair. Held at Robothon, in the Seattle Center. See the writeup (posted Oct 30th) on NxtLog
| | Pictures
|
| | #38
May 19, 2007
| | ---------------------------------------------------------------------------
Game Playing Robot
Build a robot to play a game. It can be a single player or multiplayer game. It can be a game that a robot plays against another robot, or against a person, or against itself. Use your imagination.
Micromouse Maze
Build a robot that completes some aspect of the micromouse maze (which will be an event at the next Robothon).
| | Pictures
|
| | #37
March 17, 2007
| | ---------------------------------------------------------------------------
Demo Bot
Build a robot that does something that is interesting or clever, is interesting to watch, or is unique in some other way. A list of suggestions (that you aren’t bound by in any way): a game playing robot; a robot that mimics some device in the real world; a robot that performs some difficult feat; a robot that creates a work of art; or a robot that is fun to interact with. This SMART meeting followed the SRS meeting. We had to show off how easy it is to build awesome robots out of LEGO!!
| | Pictures
|
| | #36
January 27, 2007
| | ---------------------------------------------------------------------------
Walking Robot
Build a robot that can walk, as well as turn (change direction). Have your robot walk whatever pattern you like to demonstrate, but an example would be to walk 2 feet, turn 90 degrees, walk 1 foot, turn 120 degrees, and return to the starting point.
| | Pictures
|
| | #35
November 18, 2006
| | ---------------------------------------------------------------------------
Swinging Robot
Build a robot that can swing. A rope will be provided that you will hook your robot onto, so make sure it can attach and detach easily. The rope will be quite thin, of an unknown length, and hung in the shape of a “U” with the two ends tied high up, approximately 18-inches apart. For a simple challenge, you can calculate the period of oscillation and enter that as a parameter to your robot. Better is if your robot can determine the period itself. For the biggest challenge, see if your robot can learn how to swing completely on its own. In all cases, we’ll have two or three different length swings for your robot to try, so hard-coding the length of your robot’s swing won’t work.
| | Pictures
|
| | #34
September 30, 2006
| | ---------------------------------------------------------------------------
BrickHeap Wars
Teams will need to sign up ahead of time, but other than bringing a laptop and the electronic components yourself, there is no need to build anything for this meeting. The event will take place at Robothon, in the Seattle Center.
| | Pictures
|
| | #33
July 29, 2006
| | ---------------------------------------------------------------------------
Drawing or Writing
Build a robot that can cross the gap between two tables without leaving any part of it behind.
| | Pictures
|
| | #32
May 20, 2006
| | ---------------------------------------------------------------------------
BrickHeap Wars
Teams signed up ahead of time, and at the meeting were given the challenge to build a space elevator robot that delivered several payloads to ‘geosynchronous orbit’.
| | Pictures
|
| | #31
March 25, 2006
| | ---------------------------------------------------------------------------
Great Ball Contraption
Build a ‘contraption’ that passes a bunch of LEGO soccer balls along. It can be robotic in nature, or not -- that’s up to you.
| | Pictures
|
| | #30
January 28, 2006
| | ---------------------------------------------------------------------------
Robot Drag Racing
Build a robot that races down a 3/4” black tape line, detects the end, and returns back to the starting line. Robots are placed completely behind the starting line at the beginning.
| | Pictures
|
| | #29
November 19, 2005
| | ---------------------------------------------------------------------------
Simple Gap Crossing
Build a robot that can cross the gap between two tables without leaving any part of it behind.
| | Pictures
|
| | #28
September 24, 2005
| | ---------------------------------------------------------------------------
Robothon Preparation
This meeting was reserved to prepare for the competitions and displays that SMART members would be participating in at Robothon on October 7-9th.
| | Pictures Robothon Pics
|
| | #27
July 23, 2005
| | Clear the Field
This was a BrickHeap Wars challenge. Two groups compete to build robots in a limited time and with restricted pieces at the meeting.
The object was to build a robot to clear your team’s rectangular field of cylinders; the other team’s field is close by. At the end of the time, the score is computed as one point for each of your cylinders still on your field, plus two points for each of your opponent’s cylinders still on the field. Lowest score wins.
| | Pictures
|
| | #26
June 25, 2005
| | Stepladder Traversal
Mount, ascend, decend and dismount a stepladder. The stepladder will be made of 3/4” pipes, spaced 6” apart. The first rung will be 6” off the floor. Your robot won’t know how many rungs there are to the top of the ladder, nor will it know exactly what the angle of the ladder will be. But both sides of the ladder will be identical in length and angle with the floor.
| | Pictures
|
| | #25
March 26, 2005
| | Easter Egg Hunt
Build a robot to move around a table looking for chocolate Easter eggs; deliver them to one of the 3” holes at each corner on the surface of the table. Move counter-clockwise when delivering eggs. See this post for details, and this picture for a schematic of the arena.
| | Pictures
|
| | #24
January 29, 2005
| | Light target
Launch a missile of your choice at a 60 watt light bulb which will be five feet away (and behind a plexiglass wall!) You have three tries, and may only reload your missile, and provide a single ‘bit’ of feedback after each trial. Pressing one of several buttons before each round is acceptable, but setting dials, sliders or levers may not be used as feedback to the device.
| | Pictures
|
| | #23
November 20, 2004
| | Line Tracking Block Stacking
The mini-challenge is to build a robot that will pick up a set of blocks that are on a 3/4” black line, and build one or more stacks of blocks out of them. The robot can build the towers anywhere it wants, on or off the line. For a simpler challenge, build only two block high towers, and only along a straight line. For a more difficult challenge, build towers as high as you can, and follow a line with bends in it. (Blocks will be placed on the line at least six inches past any bend.)
(Originally: Stack a neat row of 16 4x4x4 LEGO cubes into towers. Cubes will initially be four inches apart. Less towers is better.)
| | Pictures
|
| | #22
September 18, 2004
| | ---------------------------------------------------------------------------
BrickHeap Wars
At this meeting, two teams built and programmed robots to follow a line with Lego cubes on it, and stack those cubes into towers. They were given identical piles of Lego, and a bit over three hours to accomplish this task.
| | Pictures
|
| | #21
July 31, 2004
| | Milkman Delivery
Build a robot that tracks a line and delivers milk bottles at specified locations on the track. For milk bottles, design your own stack of Lego bricks.
(Originally: A bot has to travel a route (line following) and deliver “milk bottles” (perhaps a stack of white bricks?) to exact locations, points are given to the number of correct deliveries within a preset time limit.)
| | Pictures
|
| | #20
May 22, 2004
| |
|
 |
Gap Crossing - Cube Gathering
Pick any subset (or the whole thing!) of the third event from the 8th Workshop 3D RCX Challenge.
Build a robot to collect objects and bring them across a gap. Robots will start at the back end of one table and need to cross over to a second table which is 2-inches away from the first one, to retrieve objects, bringing them back, one at a time, to the first table. This means one block must be deposited in the finishing box before picking up the next block.

The tables will have a light surface with 3/4” matte-black tape lines on them as in the above diagram. The objects will initially be in the 6” x 20” box on the far table, and must be deposited in the finishing box on the first table to count. Robots should not wander out of their 20-inch wide ‘lane’. This is the space that goes from their starting box to the finishing box. Adjacent lanes will only have a narrow separation between them, and lanes may be very near the sides of the table. The length of a lane (width of the tables) is not specified, but will be on the order of a few feet.

The objects to be collected are Lego cubes. They consist of six 2x4 bricks, stacked together, and topped by 4 smooth tiles. They will be white. There will be at least ten cubes scattered randomly in the starting box, clustered towards its center.
The initial maximum size of a robot is 12-inches wide by 16-inches long. There is no height restriction. Robots may unfold themselves, but must do this on their own.
| | Pictures
|
| | #19
March 27, 2004
| | Crate Passing Robots
Build two robots that look for each other, and pass a crate from one to the next. While the most obvious way to do this is with two RCXs, it can also be done with one by having a stationary “robot” as your second one. I suggest starting to work on this challenge by figuring out how the two robots can find each other. Once you’ve got that figured out, then work out how to get them to ‘face’ each other, and then pass a crate back and forth.
You are welcome to determine how far apart your own two robots should be to start with, but if you’re looking for some guidance, I’d suggest having them about 10 to 12 feet apart, and oriented randomly to each other (that is, don’t assume they’re facing each other when you put them down). As with all mini-challenges, feel free to bring whatever you can get working. And even if you can’t get anything working, you can still bring whatever you have, to get ideas and help from others that show up.
| | Pictures
|
| | #18
January 31, 2004
| | ---------------------------------------------------------------------------
Creative Crate Contraption
Build a new type of robot that manipulates crates or mini Lego soccer balls or basketballs. Use your imagination.
For a look at what previous robots have done, see this post.
| | Pictures
|
| | #17
November 8, 2003
| | ---------------------------------------------------------------------------
BrickHeap Wars
At this meeting, four teams built and programmed robots to collect mini Lego soccer balls. They were given identical piles of Lego, and about three hours to build and program their robots.
| | Pictures
|
| | #16
July 26, 2003
| | Chasm Crossing with Rope
Cross an arbitrary gap (several feet) between two tables using only a rope that is strung fairly tauntly between them. You start on the first table, and should attempt to end on the second table. Start by just crossing using the rope, and stopping when you get to the second table. For the full challenge, work out a way to get up onto the other table. Finally, for a real challenge, see if you can do the whole thing while keeping your center of gravity above the rope the whole time! I’ll bring a 1/4-inch solid braid nylon rope, but you can bring your own rope, if you like.
Another way to get bonus points would be if you can start at a random location on the table and find the rope first, before crossing over to the other table.
(Originally: Cross a two to four foot gap between two tables using a rope that has been strung over them. Your robot needs to start on the first table, and end on the second table.)
| | n/a
|
| | #15
May 17, 2003
| | Maxwell’s Demons
A competitive game played on a surface that is half black, half white. Your robot will start on one side, your competitor’s on the other. Scattered randomly on both sides will be a number of 4x4x4 cubes, some white, some black. Both robots attempt to get the white ones onto their own side, and get rid of the black ones. No hoarding of blocks! You may only push them around. See more detailed rules in this post. (Ignore the ‘expert division’ for this mini-challenge.)
| | n/a
|
| | #14
March 29, 2003
| | Rope climb
Start a foot or so in front of a rope of your choice which will be tied to a 2x4 supported by two tables. Move towards the rope and then start climbing the rope. You must climb so that the bottom of your robot is at least 12 inches above the floor. Extra points for reaching the top or climbing back down.
(Originally: Climb a 6 foot rope of your choice. Put a knot at the top and bottom. After you get to the top, climb or slide back down. [This one needs to be fleshed out more - there’s no need for an RCX or programming as it stands. Anyone with ideas please let us know.] )
| | Pictures
|
| | #13
January 25, 2003
| | Token Finding
Move about a table top, looking for, and stopping on a 2x2-inch square of black tape. Make sure you don’t fall off the table.
(originally: Move about a white circular area which has a 2-inch black border, looking for, and stopping on a 2x2-inch square of black tape.)
Try to come up with some solution that is better than just randomly wandering around the table looking for the square. Don’t make any assumptions about your robot’s starting location, or the position of the square.
Grand Challenge: Figure-8 Racing -- This meeting was the first installment of our new Grand Challenge which will continue for the next few meetings. Approximately 8 robots are currently in the works, but only two were somewhat ready to be tested.
| | Pictures
|
| | #12
November 16, 2002
| | ---------------------------------------------------------------------------
Slope Traversal
Given an eight-foot long 2x8 resting against a chair or table, build a robot that can move up the plank no matter how steep it is. Use whatever method of locomotion seems appropriate. Don’t fall off the plank. Note that because the plank is resting against something, if you try to hold the bottom for extra grip, you’ll have to deal with the place where it is held up. Also, make sure your robot stops: don’t fall off the top!
We’ll start with the plank horizontal on the floor, with the robot on the plank, at one end. Then for each run we’ll increase the slope. The robot will start on the plank, but also resting on the floor for all but the first run.
| | Pictures
|
| | #11
September 28, 2002
| | ---------------------------------------------------------------------------
BrickHeap Wars
At this meeting, four teams built and programmed robots to unload pallets from a truck. They were given identical piles of Lego, and a bit over three hours to accomplish this task.
We also tested the following robots for NWBrickCon which was the following weekend:
Simon Says
Follow the leader. All robots will run at once for this event. A “leader” will be brought to the meeting which will do a little dance, and at the same time signal to all the other robots what it is doing. All the other robots must follow as closely as possible. Each command must be completed in 1.5 seconds or less.
The commands will be as follows:
1-6 - Move forward 1-6 inches
11-16 - Move backwards 1-6 inches
20 - Turn right 90 degrees
21 - Turn left 90 degrees
30 - Turn clockwise 360 degrees
31 - Turn counterclockwise 360 degrees
40 - Play a DOUBLE_BEEP
41 - Play a SOUND_UP
42 - Play a SOUND_DOWN
| | Pictures
|
| | #10
July 27, 2002
| | Walking Obstacle Course
Walk from the starting line to the finishing line, across or around a number of scattered two-by-fours which will be placed on edge.
| | Pictures
|
| | #9
May 18, 2002
| | Light locator
Locate a 60 watt light bulb. Move around the room looking for a single light bulb place near the floor. Stop when you get to it. Make sure you navigate around tables, chairs, and other obstacles. You might have to search for the light bulb.
| | Pictures
|
| | #8
March 30, 2002
| | Dead-Reckoning
Build a robot that can drive around two markers in a figure-eight pattern.
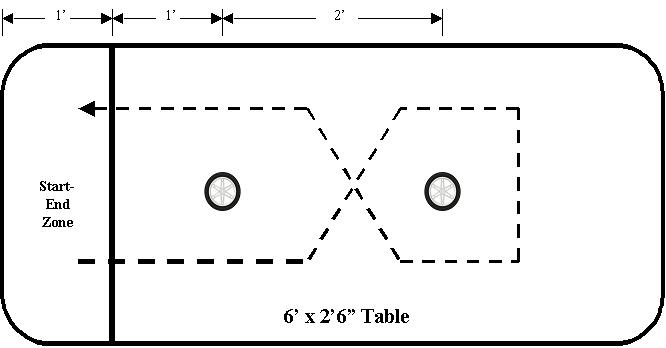
The start/end zone will be marked off with a piece of black tape. Be careful not to fall off the table! And remember not to touch the cones in your navigation.
| | Pictures
|
| | #7
January 26 2002
| | Drag Race
The starting and finish lines are highly reflective tape, placed 16 feet apart. Your dragster must get to the finish line as fast as possible, yet stop within 6 inches! Nothing but LEGO rubber may touch the floor (carpet, that is).
| | Pictures
|
| | #6
November 17, 2001
| | ---------------------------------------------------------------------------
Workshop 3D RCX Challenge - Second Chance
We brought our improved Workshop 3D RCX Challenge robots, and tried them out again. Much discussion on what we learned, and how the robots were improved.
| |
|
| | #5
September 15, 2001
| | ---------------------------------------------------------------------------
No mini challenge this meeting; preparations for Workshop 3D RCX Challenge #3.
| |
|
| | #4
July 28, 2001
| | Obstacle Course
Climb over randomly scattered 2x4s. These will be at least a foot long, but may be longer. Most will be lying flat, but there may be a couple that are on edge. See if you can travel in a straight line even when obstacles are at an angle.
| | Pictures
|
| | #3
May 19, 2001
| | Walking Seeker
Walk around a table without falling off, look for a heavy, reflective object, and stop next to it. You may not have rotating wheels (or equivalent) touching the table at any time (though permanently locked wheels, for traction, are allowed). The object will be covered with reflective tape, (you can use a bicycle reflector to get a vague idea of what will be used) so that you can actively search for the object. Also, other actions besides walking are acceptable. Shuffle, wobble, whatever. Just no rotating wheels!
| | Pictures
|
| | #2
March 31, 2001
| | Stay on Table
Drive around a rectangular table without falling off. When your robot comes into contact with a heavy object, stop. The heavy object brought to the meeting will be a black ‘cube’ 6 Lego-units square, and five bricks high made out of weight elements and plates. It weighs about 12 ounces, or 1/3 of a kilogram. But the specifics shouldn’t be too important. Any fairly small, heavy object should do.
| | Pictures
|
| | #1
January 28, 2001
| | Edge Follower
Follow the left edge of a (minimum 6”) wide black line. No turn will be greater than 90 degrees. Don’t worry about having a super-refined or super-fast robot.
| | Pictures
More Pictures
Movies
Notes on Gus Jansson’s Steerbot
|
|
{kind=link}
{kind=link}