Here are assembly instructions on building a geared puck grabbing
mechanism. It was designed to pick the foam pucks used in the Workshop3D
RCX challenges but will also work with the RoboSport pucks and even certain
Lego Wheels with Tires.
This mechanism is shown without a motor as it is mainly intended to
demonstrate how the mechanism works. On my puck gathering robots I
connected one end of the axle directly to a motor using an axle joiner.
This makes the grabbing mechanism very quick and the motors should only
be run for a fraction of a second. I also used low power to initially close
the grabber then full power to lift and throw.
Qty. Color Description
----------------------------------------------------
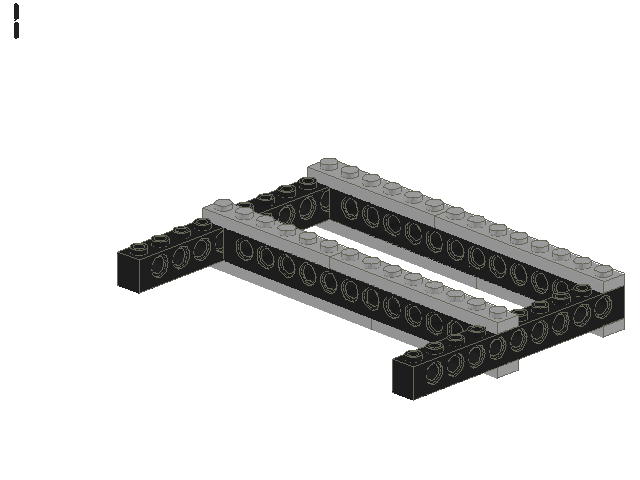
4 Light-Gray Plate 1 x 6
4 Light-Gray Plate 1 x 8
2 Black Technic Brick 1 x 10 with Holes
2 Black Technic Brick 1 x 12 with Holes
|
|
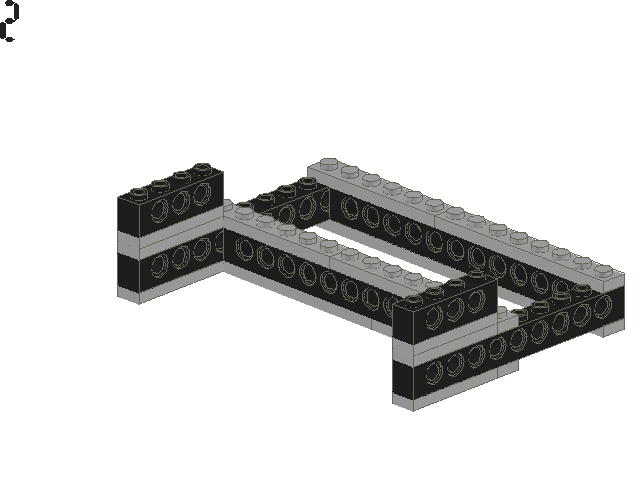
6 Light-Gray Plate 1 x 4
2 Black Technic Brick 1 x 4 with Holes
|
|

4 Light-Gray Plate 1 x 4
2 Dark-Gray Technic Axle 3 with Stud
2 Black Technic Brick 1 x 4 with Holes
2 Black Technic Brick 1 x 8 with Holes
2 Light-Gray Technic Bush
6 Black Technic Pin with Friction
|
|
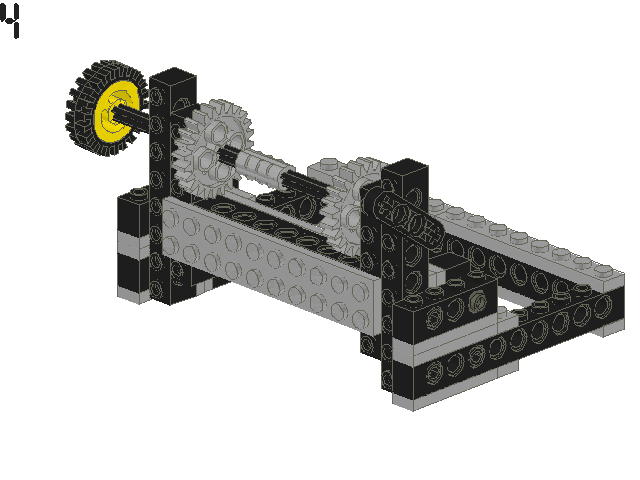
2 Light-Gray Plate 2 x 2
2 Light-Gray Plate 2 x 10
2 Black Technic Axle 8
1 Light-Gray Technic Axle Joiner
2 Black Technic Brick 1 x 6 with Holes
2 Black Technic Brick 1 x 8 with Holes
2 Light-Gray Technic Gear 24 Tooth
1 Black Technic Liftarm 1 x 4
1 Black Tyre Small
1 Yellow Wheel Centre
|
|
NOTE: The 2 2 x 2 plates are attached on each end of the back 2 x 10 plate.
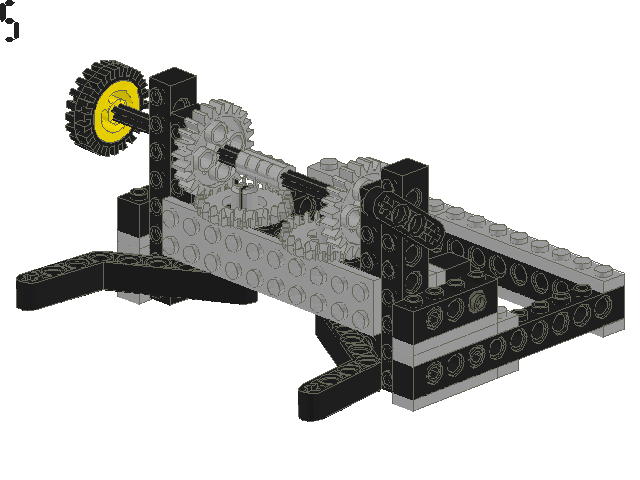
2 Black Technic Axle 4
2 Light-Gray Technic Gear 24 Tooth Crown
1 Black Technic Liftarm 1 x 9 Bent
1 Black Technic Liftarm 1 x 9 Bent
|
|
Once assembled you will probably need to make some adjustments to the gears.
Slide the two 24 tooth gears in a little so they turn freely inside the crown
gears. Now position the axle so that the lift arm at the end of the axle
is just below a 45 degree
angle above horizontal. With the grabbing arms all the way open, glide the
24 tooth gears back in place to mesh with the crown gears.
|