|
Organizations / United States / SMART / David Schilling / CrateContraption / 2005 / Crossroads | |
| The Crate Contraption - Crossroads Shopping Center 2005 For Easter weekend, along with a Robotic Easter Egg Delivery system, SMART showed their Crate Contraption at Crossroads Shopping Center in Bellevue, WA. The setup was pretty much identical to what we showed at NWBrickCon 2004, a few months ago, but the programming of every robot was improved. The videos shown on the NWBrickCon 2004 Crate Contraption review were actually all taken at the Crossroads Shopping Center event. (The sound on the video I took at NWBrickCon was messed up.) Here I’ll just highlight what some of the differences and improvements were. The most important change was that Gus Jansson totally overhauled his scripting system, making it easier than ever to write, and now edit scripts for the robots on the fly. We already had the very desirable feature of not having to download programs every time a change had to be made. Now we had the additional ability to make changes to the scripts we recorded with the remote control. This came in handy several times during the event, when it turned out that the crane was occasionally taking longer to get out of the way because it was balancing slower than average. The forklifts know when there is a crate present (or not), but they can’t easily tell if the crane is still holding onto the crate. So after determining that the crate has recently appeared, they wait an additional amount of time before going to pick it up. To increase this waiting period, we just had to go to that step in the script, and replace it with a longer wait. Instead of three digit codes, Gus switched to four-digit codes for everything. This makes typing in a command slightly longer, but now we don’t need a sheet with all the commands listed out, since the new commands are much more logical. All line-tracking commands, for instance, start with ‘1’. The next digits tell if the line is being tracked forward or backward, right edge or left edge, and whether the line should be crossed before tracking begins. Another improvement to the line-tracking part of the software was watching power levels. Earlier, whenever we put in fresh batteries, the robots would be so much more energetic that they would track the line erratically. Or if they were tuned to track the lines with fresh batteries, when the batteries were more drained, they would sometimes be too sluggish, and miss a line or one of the marker spots. Now line tracking is automatically adjusted to take into account how much charge the batteries hold. Even though the crane looks very similar, the internal workings were completely replaced. The previous version had relied on touch sensors to tell when it was balanced or not. The new version uses a light sensor that points at the boundary between a white and black brick. When it’s balanced properly, it should see exactly 50% gray. And now rotation sensors are used in most of the places that measure the distances of things. This is because Mark replaced the standard LEGO firmware with the SWAN firmware, which doesn’t exhibit the rotation sensor problems. Finally there was a glitch in the gear train of the front-end loader so that when it was trying to pick up a particularly large bunch of balls, sometimes two gears would end up not skipping, but locking teeth against each other. This was a big mystery at the NWBrickCon event, as the robot would work right dozens of times, and then suddenly stop in the middle of a scoop. Helping out the motor just a bit would get it to go again, but there was no discernable problem. It was thought the motor might be burning out, but a fresh motor revealed the same problem. After the event it was finally determined that two eight-tooth gears can sometimes lock together, tooth against tooth. And so it required a redesign of the gear train to solve this problem. Blooper Video 1 - 0:47 (12.9Mb) (DIVX size 2.5Mb) Blooper Video 2 - 0:02 (0.8Mb) (DIVX size 0.3Mb) Robotic Easter Egg Delivery System Besides the Crate Contraption at this show, we also had a Robotic Easter Egg Hunt. The mall marketing manager convinced us that calling it a “Robotic Easter Egg Hunt” was a bad idea. Kids would think that they got to look for eggs, no matter what adjectives we added to the event name. So while our club still called it an Easter Egg Hunt, officially it was known as a Robotic Easter Egg Delivery System. The concept was pretty simple. Build robots to look for chocolate Easter eggs, and bring them to the corners of the table. There they would be dropped into holes, and kids would be able to eat them. Well, the kids really liked that, though some got way more than their share of chocolate eggs! Some of the robots did really well, others, not quite so well. But it was a lot of fun.    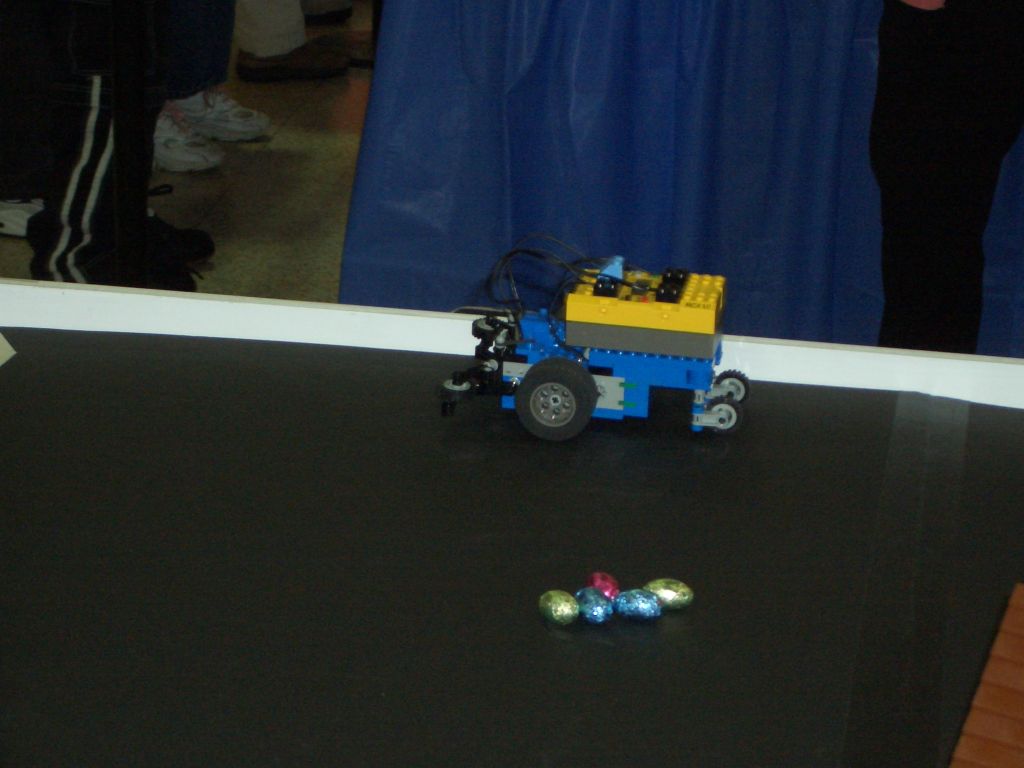   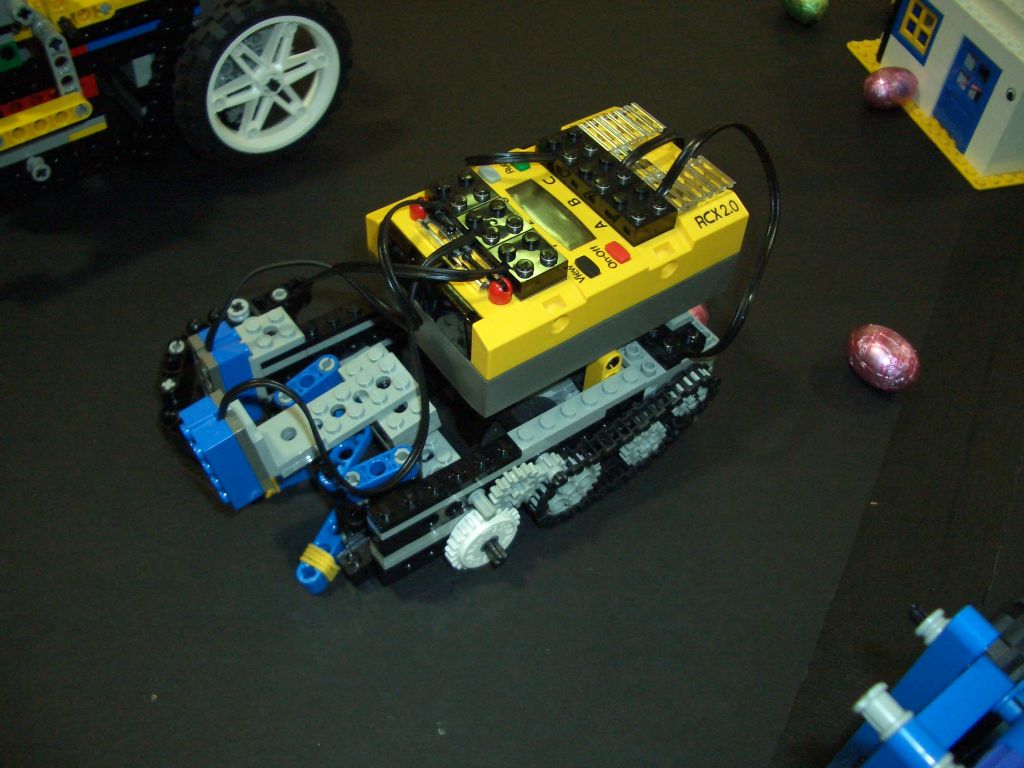 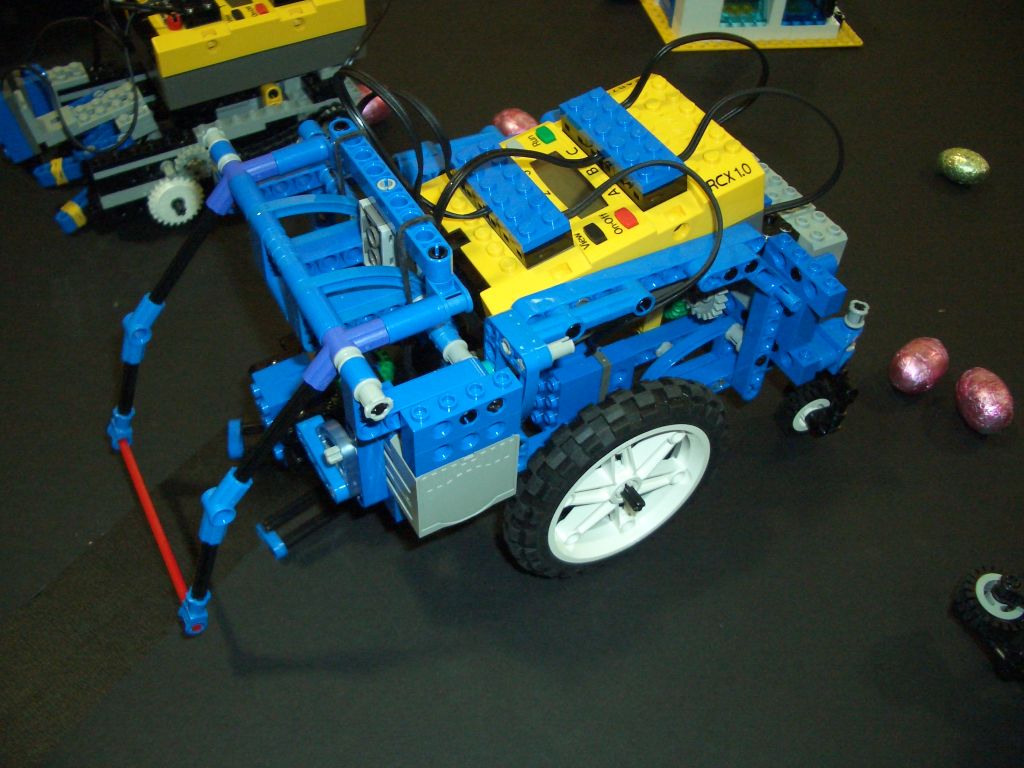  
Easter Egg Delivery System Video #1 - 0:25 (6.7Mb) Easter Egg Delivery System Video #2 - 0:29 (7.8Mb) Easter Egg Delivery System Video #3 - 0:17 (4.6Mb) |
|
Primary content in this document is © David Schilling. All other text, images, or trademarks in this document are the intellectual property of their respective owners. |
| |
©2005 LUGNET. All rights reserved. - hosted by steinbruch.info GbR |