|
Organizations / United States / SMART / David Schilling / CrateContraption / 2004 / NWBrickCon | |
| The Crate Contraption - NWBrickCon 2004 At the third annual NWBrickCon SMART displayed their best Crate Contraption to date! This year we tied all the robots into a construction theme. A large building “under construction” was built as part of the layout. With a large building you’d expect to see a crane, and that was the center of the display. A front-end loader and a dump truck were at the front, and rounding out the display were two forklifts, one on the building, one beside it. One interesting thing about the mobile robots was that they all used basically the same program. One of the problems with the Crate Contraptions that we’ve done in the past is that a small change in the way the layout was set up often meant reprogramming the robots. So while we were working on the layout and integrating the robots to work together, this meant we were often downloading new versions of the programs. And *that* meant that all the other robots had to be turned off, because you don’t want to download a wrong program to one of them. So some time ago Gus Jansson created a scripting system for his forklift. It contained code to drive, follow lines, pick up crates, etc., but it didn’t actually tell the forklift when to do any of these things. Instead it had two modes: a record and a playback mode. In record mode, you would use the remote control to key in codes that would tell the forklift to track the line a certain way, or operate the lift, etc. Each command would run in turn in the playback mode, until it was ‘done’. For tracking lines, the robot would track the line up to the next shiny spot. It was a fairly simple task to change the line tracking code to deal with different steering mechanisms. All that was left was changing the code specific to each robot. One knew how to operate the lift on a forklift, another how to operate the bed on a dump truck, or the scoop on a front-end loader. This meant that all the mobile robots could use essentially the same scripting system. We’d key in a bunch of three-digit codes using the message buttons on the remote, and then the robot would know what to do. If the layout was changed, it was just a matter of re-keying the codes, not totally reprogramming the robot. Very nice! The layout we used was simple, but effective. Here is the schematic and two good overview pictures.  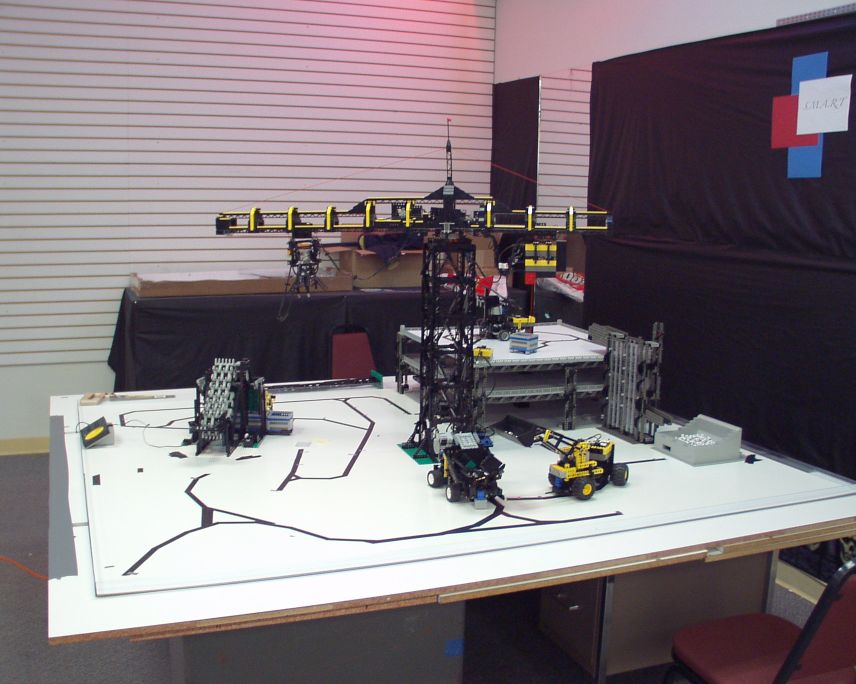 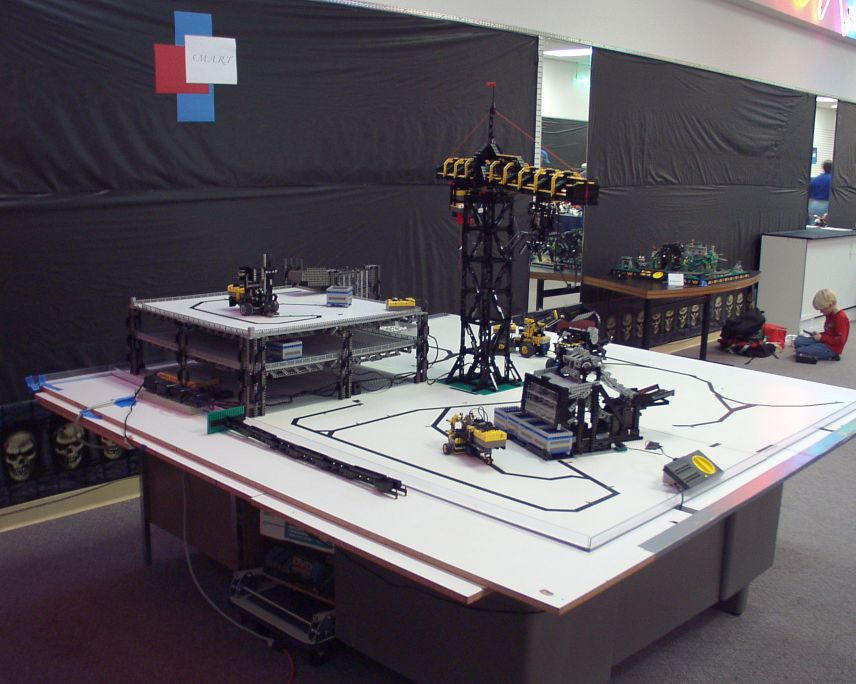
Here are two overview videos showing the layout in action. Note, the second one is rather large. Overview video - 0:42 (size 11.6Mb) (DIVX size 2.5Mb) Overview video with close-ups - 2:14 (size 36.5Mb) (DIVX size 7.1Mb) Click on these thumbnails to see the pictures in more detail:          
Robot Descriptions and Videos The crane was at the center of our display. It was self-balancing: when it moved the gripper in and out, or picked up a crate, (full or empty) it would adjust a counterweight on the back of the crane to offset the weight of the load it needed to carry. This counterweight was a pair of RCXs. The two RCXs communicated with each other to handle all the tasks of running the crane: there are more than three inputs and outputs required to operate a crane. It needs to turn the boom to whatever angle is required, move the trolley in and out, and the gripper (a hook on a normal crane) up and down. Each of these already requires a motor and at least one sensor. More are required to sense if a crate is there, open and close the gripper, and balance the crane. To help communication be reliable between the two RCXs, a hood covers the IR ports, helping them to see each other, and block all external interference. This also helps the other RCXs in the Crate Contraption to not see the chatter that is going on between the two crane RCXs. The crane was designed by Mark Kenworthy. Crane 2x Video - 3:14 (size 53Mb) (DIVX size 11.4Mb) Crane video - 0:26 (size 7Mb) (DIVX size 1.6Mb) 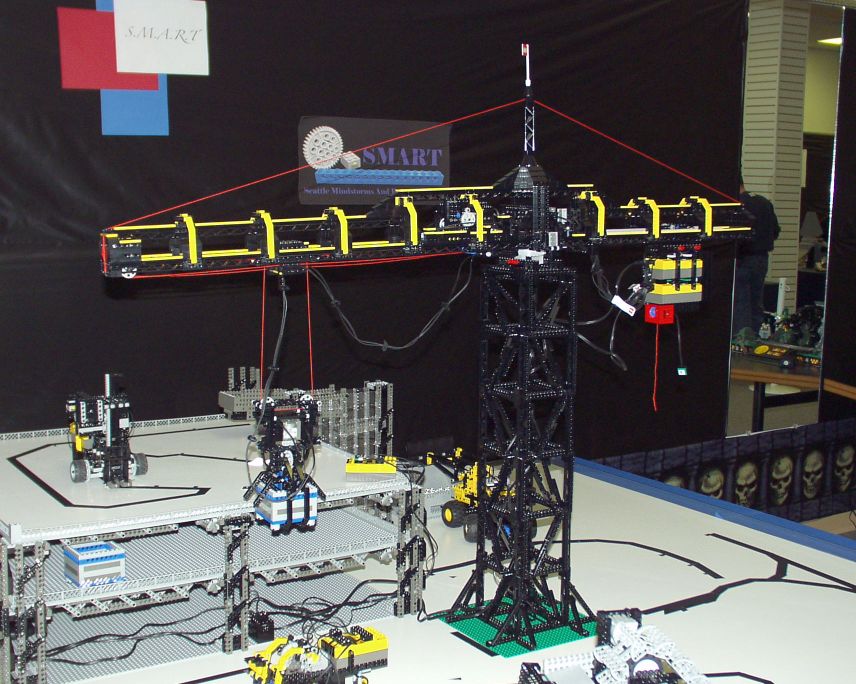 
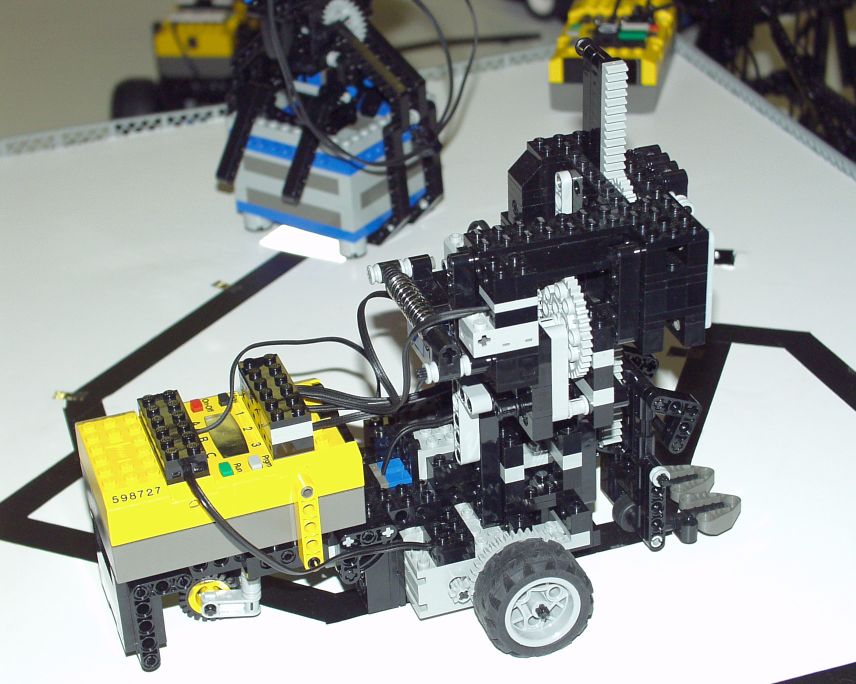
The Dumping Forklift has been in all the Crate Contraptions so far, but it’s getting better all the time. It can lift a crate all the way up, and dump its contents out, which is where it gets its name. For this layout the forklift needed to be able to detect when the crane had dropped off or picked up a crate. All the sensor ports are already used, one even overloaded, with a touch sensor and light sensor sharing one port. While it might be possible to add another touch sensor to find out if a crate was there, this wouldn’t work in this case, since the sensing had to be done from a distance. The timing couldn’t be determined ahead of time, so it’d be fairly certain that eventually the crane and forklift would tangle up with each other. What was needed was a way to detect the crates from a distance. The solution we came up with was to use a helper-RCX that detected crates for the forklift and send messages about the status of the pickup and drop-off locations. You can see this RCX sitting in the corner of the building. The forklift was designed by Gus Jansson. Dumping Forklift video 1 - 1:13 (size 19.7Mb) (DIVX size 3.8Mb) Dumping Forklift video 2 - 0:39 (size 10.6Mb) (DIVX size 2.7Mb) 
 
The dump truck is a rack-and-pinion steering robot that can track lines traveling both forwards and backwards. Quite a difficult task! The dump truck interacts with the front-end loader. The front-end loader will load the bed with balls, and then poke the dump truck to let it know when it’s full. The dump truck was designed by Gus Jansson. Dump Truck video - 0:37 (size 10Mb) (DIVX size 1.9Mb) Front End Loader/Dump Truck video 1 - 0:07 (size 2Mb) (DIVX size 0.7Mb)   
The Front-End Loader fills the dump truck with balls. It uses an articulated steering platform. The most clever thing about the robot, though, is the mechanics of the scooping mechanism. With a single motor, it is able to lower the bucket, scoop up the balls, raise the bucket (without dropping the balls) and tip the bucket at the top to dump the balls out! This is the only robot in the Crate Contraption to use a non-LEGO sensor. There is an ultrasonic sensor that it uses to see if the dump truck is there before delivering its load. This could also have been done with a touch sensor, or perhaps a light sensor, but it looks and definitely works better this way. The front-end loader was designed by David Schilling. Front End Loader video 1 - 1:30 (size 24.5Mb) (DIVX size 5.3Mb) Front End Loader video 2 - 0:14 (size 3.8Mb) (DIVX size 0.9Mb) Front End Loader video 3 - 0:20 (size 5.6Mb) (DIVX size 1.2Mb) 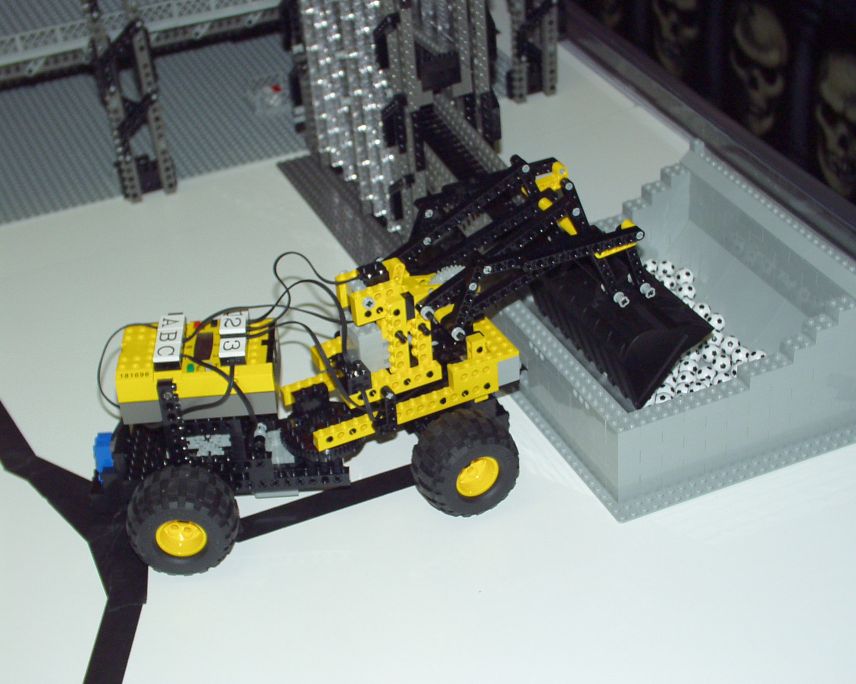    


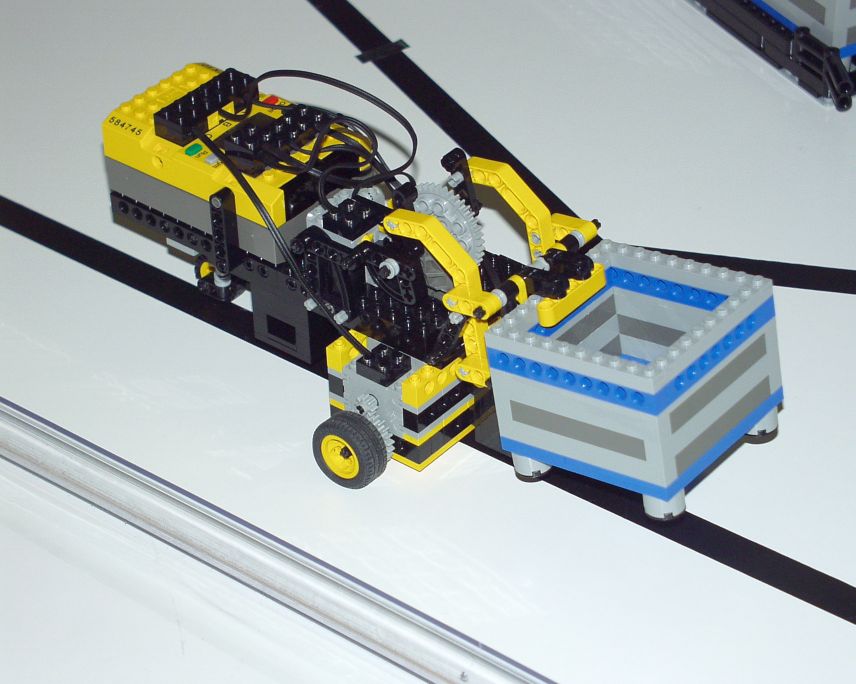
The “Simple” Forklift was anything but simple. We call it that only to differentiate between it and the Dumping forklift, which mechanically is much more complex. This forklift picks up a crate (tipping it back slightly) and moves it around. It has a light sensor pointing out its side that it uses to detect the presence of a crate. A light (in a box) is placed on the other side of where the crate will end up, and the forklift pauses at the right spot to see if the crate is there or not before continuing on. This is necessary because this forklift (as well as the other one) was servicing the crane drop-off and pick-up locations. It needs to stay clear of the crane so that the gripper doesn’t get tangled up with it. The simple forklift was designed by Gus Jansson. Simple Forklift video 1 - 1:48 (size 29.2Mb) (DIVX size 6.3Mb) Simple Forklift video 2 - 0:41 (size 11Mb) (DIVX size 2.4Mb) Simple Forklift video 3 - 0:43 (size 11.6Mb) (DIVX size 2.2Mb) Simple Forklift video 4 - 0:25 (size 6.9Mb) (DIVX size 1.3Mb) Narrated Simple Forklift video 1 - 2:19 (size 37.1Mb) (DIVX size 8.1Mb) 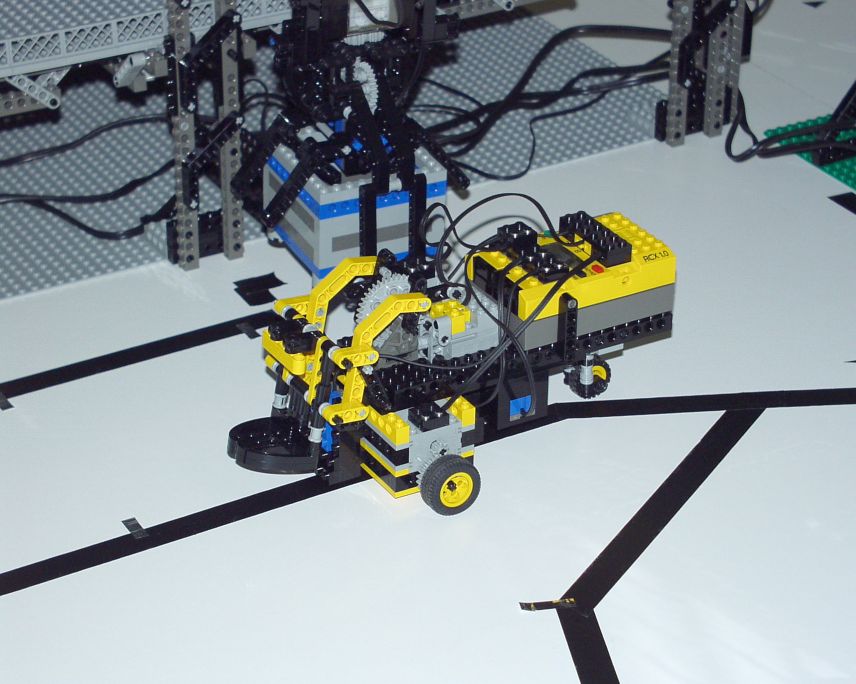 
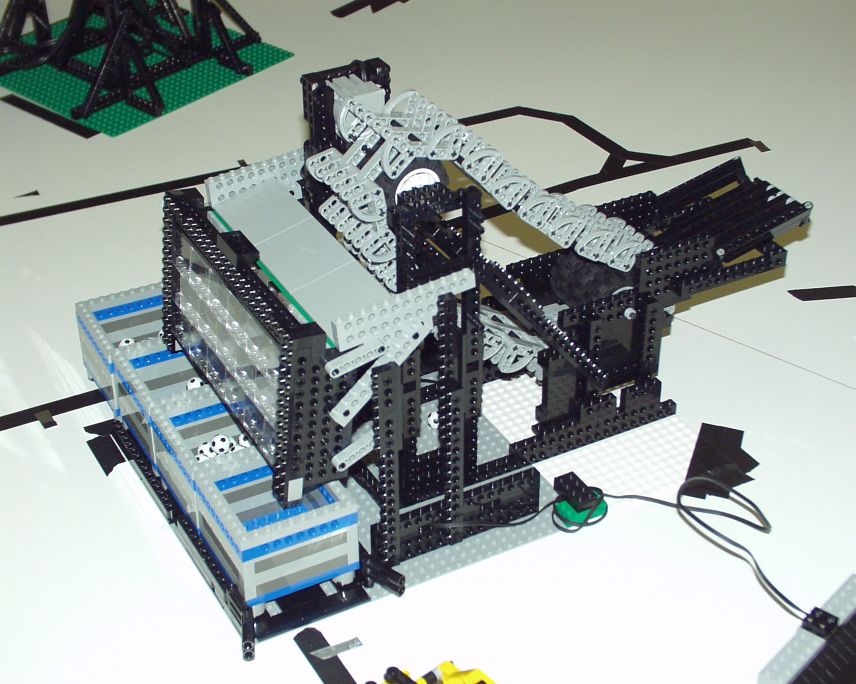
The Chain Lift was designed as a reliable high-volume ball lifting mechanism. The dump truck would drop its load of balls into the lift, where they would be distributed to a line of waiting crates. The chain is just a bunch of Technic pieces linked together, and is powered by a constantly running motor driving some medium wheels over which the chain runs. The chain lift was designed by David Schilling. Chain lift video - 0:07 (size 2Mb) (DIVX size 2.0Mb) Almost unnoticed in the display is a large building that actually takes up 1/4 of the display space. It’s there just as a back drop, something that the other robots work around. It gives the construction site a reason for being there. The building was designed by David Schilling. This version of the crate contraption was surprisingly robust. The forklifts never failed, the dump truck only had the slightest of problems when the batteries were real low, and the front end loader worked very well too except that after many hours it developed a glitch at the point of its scoop that required the most force. Even the crane which, while it displayed the most problems of the bunch, was so accurate once it was set up right, that it consistently picked and placed crates to within less than one-stud accuracy. Thanks to Gus, Mark and David who built the robots and put on this version of the crate contraption! |
|
Primary content in this document is © David Schilling. All other text, images, or trademarks in this document are the intellectual property of their respective owners. |
| |
©2005 LUGNET. All rights reserved. - hosted by steinbruch.info GbR |



{kind=link}